前言 目前的数据集内基本是检测小目标,但是因为小物体检测比较困难,需要想办法提升小目标的检测结果。最近读了一篇《Augmentation for small object detection》的论文,里面讲了一些数据增强的方法来提高小目标的检测效果。
mmdetection是一个基于pytorch的目标检测工具箱,简单易用。本篇博客的主要目的基于mmdetection实现一个数据增强方法。
SmallObjectAugmentation Augmentation for small object detection 的论文里面讲述几种小目标增强方法
过采样
In the first set of experiments, we investigate the effect of oversampling images containing small objects. We vary the oversampling ratio between two, three and four. Instead of actual stochastic oversampling, we create multiple copies of images with small objects offline for efficiency
这是一个花费精力比较少且简单的方法,简单来说就是如果图片中有小目标,就在训练集中将这个图片多复制几次。
增强
In the second set of experiments, we investigate the effects of using augmentation on small object detection and segmentation. We copy and paste all small objects in each image once. We also oversample images with small objects to study the interaction between the oversampling and augmentation strategies.
另一种方法就是在每张图片中,将图片的包含小目标复制粘贴多次。在文中一共提出了三种复制粘贴策略
选择一张图中的一个小目标,在随机位置中复制粘贴多次
选择许多小物体,复制粘贴在随机地方
选择每张图片的全部小物体,复制粘贴一次在随机地方
后文还提到复制粘贴时需要注意复制粘贴的时候不能和之前的标签重叠
实现 arXiv上的论文并没有给出官方实现,只有社区实现。因此这里直接参考社区的实现方法。
mmdetection的文档 中给出了自定义pipelines数据增强的方法,我们只需要实现自己的__init__函数和__call__函数,然后通过@PIPELINES.register_module()注册即可。__call__函数的输入参数和输出参数都是results,这是一个包含了图像、边界框和标签等信息的字典。
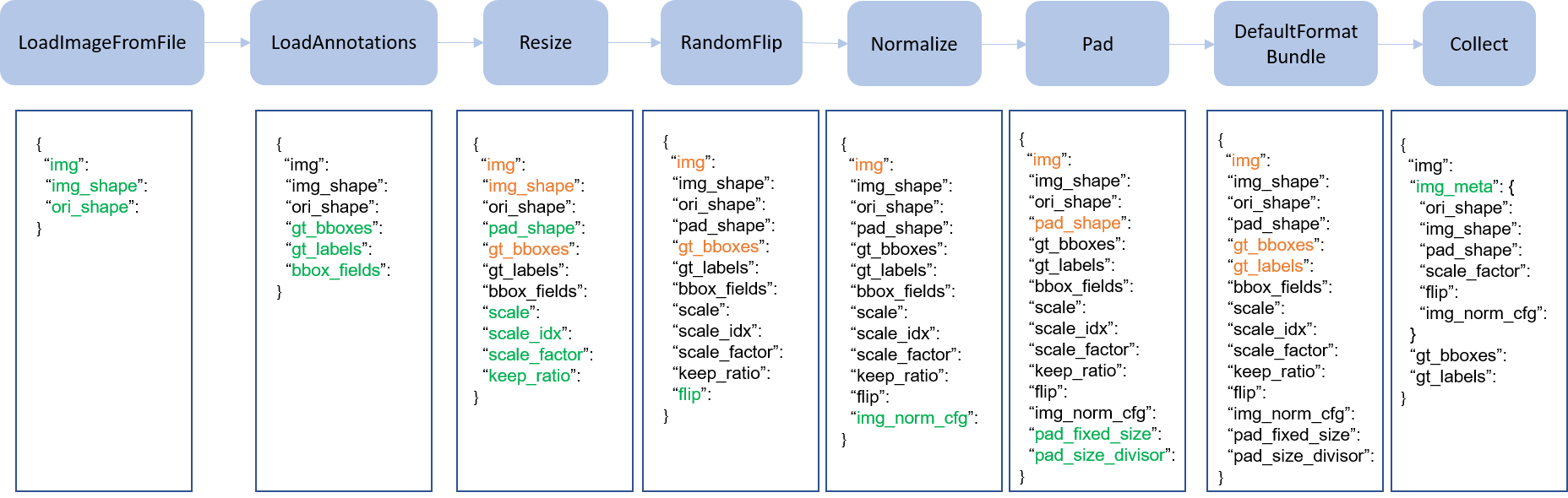
官方提供的pipelines如下图所示
通过阅读源码和观看这张图我们可以得知模型中最后使用的是results['img']、results['gt_bboxes']、results['gt_labels']等,其中gt_bboxes的格式是(list[Tensor])其中每个bbox的格式是[tl_x, tl_y, br_x, br_y]即左上角的点坐标和右下角的点坐标。
知道格式后实现起来就比较简单,源码就放在文末。
在mmdet/datasets/pipelines文件夹内新建SmallObjectAugmentation.py,并写入文末的源码。
导入模块时mmdetection有两种方法
方法一 重新编译 参考
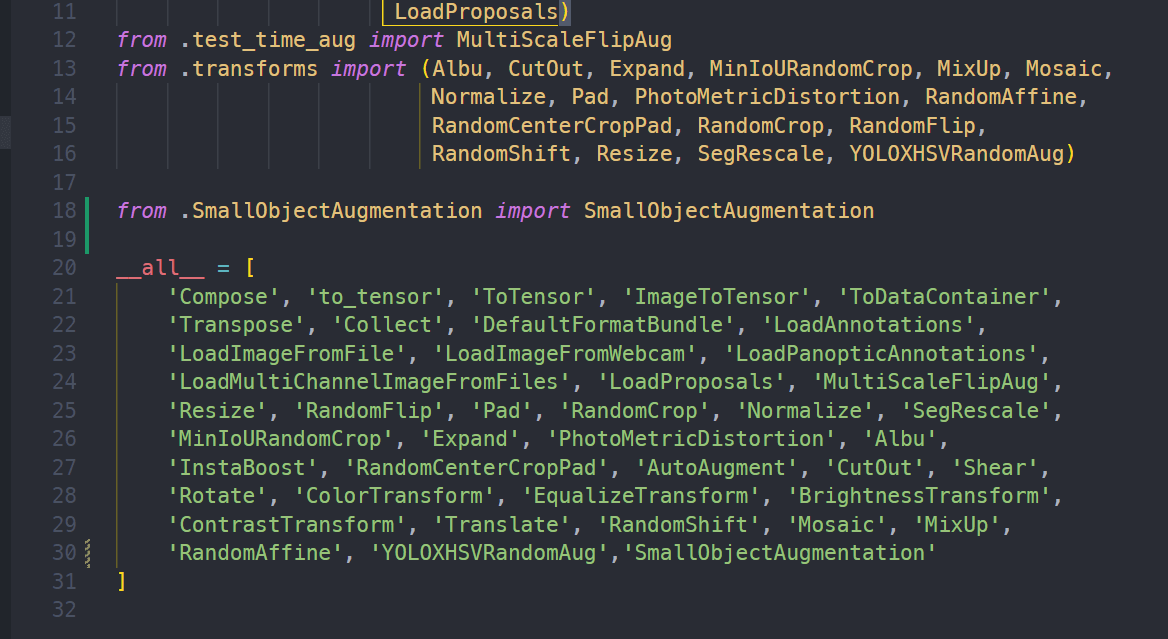
mmdet/datasets/pipelines里的__init__.py文件中添加from .SmallObjectAugmentation import SmallObjectAugmentation,__all__添加'SmallObjectAugmentation',完整修改见下
然后执行下面的命令
1 2 pip install -r requirements/build.txt pip install -v -e .
这样就完成了,实际上执行速度很快。这样就可以直接在你的config文件中使用
方法二 修改config 参考
这种方法我没有成功,读者可以自己尝试一下
修改config文件,在里面加一条,保证路径是训练脚本的相似路径
1 custom_imports = dict (imports=['path.to.my_pipeline' ], allow_failed_imports=False )
查看数据增强效果 mmdetection有提供工具让我们看数据增强的效果。yolox_tiny_8x8_300e_coco.py修改其中的train_pipeline,去除其他的数据增强,只留下我们自己的增强方法。
1 2 3 4 5 train_pipeline = [ dict (type ='SmallObjectAugmentation' ,all_objects=True ,thresh=400 *400 ,prob=0.7 ), dict (type ='DefaultFormatBundle' ), dict (type ='Collect' , keys=['img' , 'gt_bboxes' , 'gt_labels' ]) ]
然后我们可以使用mmdetection提供的工具来查看我们的效果
1 2 python .\tools\misc\browse_dataset.py your_config_path
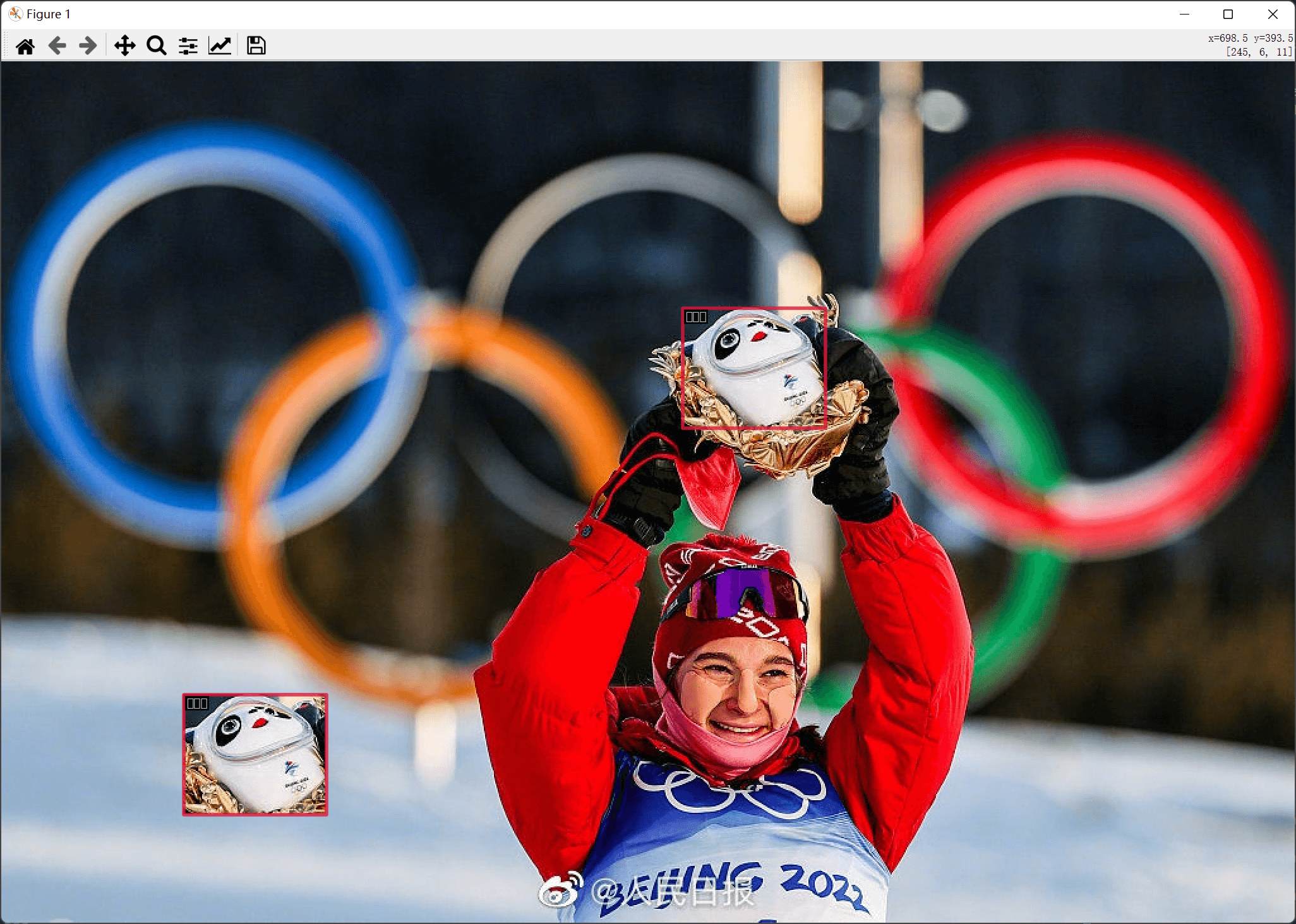
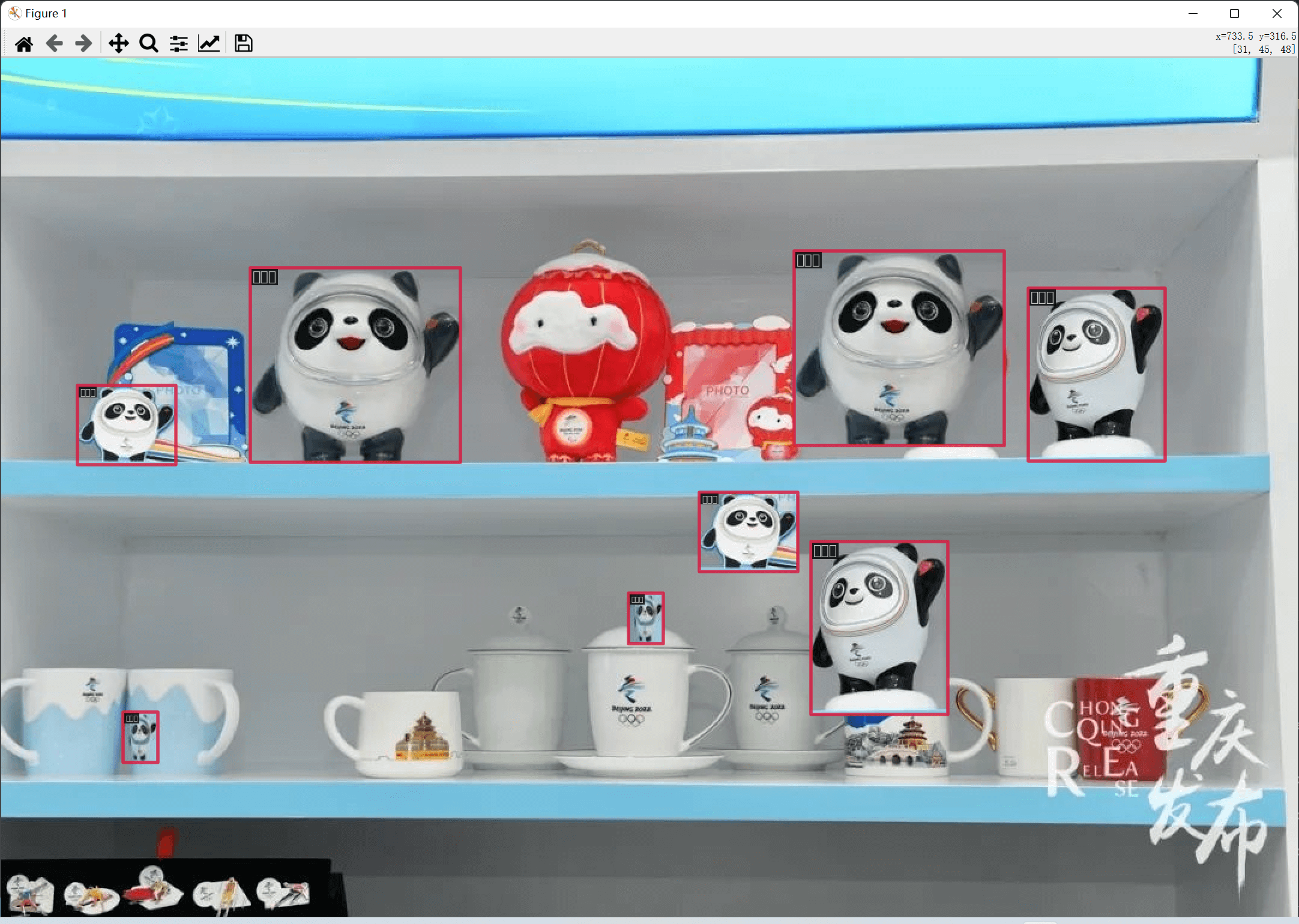
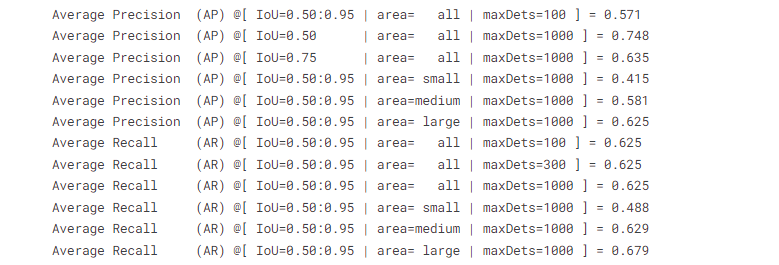
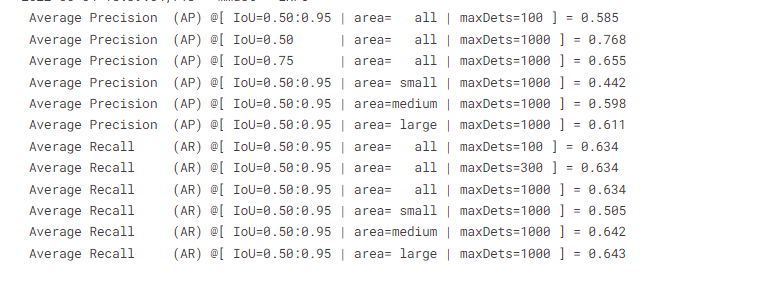
效果 为了展示效果,我这里把参数都调的夸张了点
训练效果 使用了数据增强前后的对比如下图所示,可以看到实际的训练效果有提高1%,可见效果还是可以的
增强源码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 from ..builder import PIPELINESimport numpy as npimport random@PIPELINES.register_module('SmallObjectAugmentation' class SmallObjectAugmentation : def __init__ (self, thresh=64 *64 , prob=0.5 , copy_times=3 , epochs=30 , all_objects=False , one_object=False ): ''' SmallObjectAugmentation: https://arxiv.org/abs/1902.07296 https://github.com/zzl-pointcloud/Data_Augmentation_Zoo_for_Object_Detection/blob/master/augmentation_zoo/SmallObjectAugmentation.py args: thresh: small object thresh prob: the probability of whether to augmentation copy_times: how many times to copy anno epochs: how many times try to create anno all_object: copy all object once one_object: copy one object ''' self .thresh = thresh self .prob = prob self .copy_times = copy_times self .epochs = epochs self .all_objects = all_objects self .one_object = one_object if self .all_objects or self .one_object: self .copy_times = 1 def _is_small_object (self, height, width ): ''' 判断是否为小目标 ''' if height*width <= self .thresh: return True else : return False def _compute_overlap (self, bbox_a, bbox_b ): ''' 计算重叠 ''' if bbox_a is None : return False left_max = max (bbox_a[0 ], bbox_b[0 ]) top_max = max (bbox_a[1 ], bbox_b[1 ]) right_min = min (bbox_a[2 ], bbox_b[2 ]) bottom_min = min (bbox_a[3 ], bbox_b[3 ]) inter = max (0 , (right_min-left_max)) * max (0 , (bottom_min-top_max)) if inter != 0 : return True else : return False def _donot_overlap (self, new_bbox, bboxes ): ''' 是否有重叠 ''' for bbox in bboxes: if self ._compute_overlap(new_bbox, bbox): return False return True def _create_copy_annot (self, height, width, bbox, bboxes ): ''' 创建新的标签 ''' bbox_h, bbox_w = bbox[3 ] - bbox[1 ], bbox[2 ] - bbox[0 ] for epoch in range (self .epochs): random_x, random_y = np.random.randint(int (bbox_w / 2 ), int (width - bbox_w / 2 )), \ np.random.randint(int (bbox_h / 2 ), int (height - bbox_h / 2 )) tl_x, tl_y = random_x - bbox_w/2 , random_y-bbox_h/2 br_x, br_y = tl_x + bbox_w, tl_y + bbox_h if tl_x < 0 or br_x > width or tl_y < 0 or tl_y > height: continue new_bbox = np.array([tl_x, tl_y, br_x, br_y], dtype=np.int32) if not self ._donot_overlap(new_bbox, bboxes): continue return new_bbox return None def _add_patch_in_img (self, new_bbox, copy_bbox, image ): ''' 复制图像区域 ''' copy_bbox = copy_bbox.astype(np.int32) image[new_bbox[1 ]:new_bbox[3 ], new_bbox[0 ]:new_bbox[2 ], :] = image[copy_bbox[1 ]:copy_bbox[3 ], copy_bbox[0 ]:copy_bbox[2 ], :] return image def __call__ (self, results ): if self .all_objects and self .one_object: return results if np.random.rand() > self .prob: return results img = results['img' ] bboxes = results['gt_bboxes' ] labels = results['gt_labels' ] height, width = img.shape[0 ], img.shape[1 ] small_object_list = [] for idx in range (len (bboxes)): bbox = bboxes[idx] bbox_h, bbox_w = bbox[3 ] - bbox[1 ], bbox[2 ] - bbox[0 ] if self ._is_small_object(bbox_h, bbox_w): small_object_list.append(idx) length = len (small_object_list) if 0 == length: return results copy_object_num = np.random.randint(0 , length) if self .all_objects: copy_object_num = length if self .one_object: copy_object_num = 1 random_list = random.sample(range (length), copy_object_num) idx_of_small_objects = [small_object_list[idx] for idx in random_list] select_bboxes = bboxes[idx_of_small_objects, :] select_labels = labels[idx_of_small_objects] bboxes = bboxes.tolist() labels = labels.tolist() for idx in range (copy_object_num): bbox = select_bboxes[idx] label = select_labels[idx] bbox_h, bbox_w = bbox[3 ] - bbox[1 ], bbox[2 ] - bbox[0 ] if not self ._is_small_object(bbox_h, bbox_w): continue for i in range (self .copy_times): new_bbox = self ._create_copy_annot(height, width, bbox, bboxes) if new_bbox is not None : img = self ._add_patch_in_img(new_bbox, bbox, img) bboxes.append(new_bbox) labels.append(label) results['img' ] = img results['gt_bboxes' ] = np.array(bboxes) results['gt_labels' ] = np.array(labels) return results
致谢 转载自http://qianxu.run/2022/05/05/mmdetection-custom-pipelines/ 钱佬 的实现。
参考文献 Augmentation for small object detection
Data_Augmentation_Zoo_for_Object_Detection
mmdetection doc